Motion Analysis and Object Tracking¶
CalcGlobalOrientation¶
- double cvCalcGlobalOrientation(const CvArr* orientation, const CvArr* mask, const CvArr* mhi, double timestamp, double duration)¶
Calculates the global motion orientation of some selected region.
Parameters: - orientation – Motion gradient orientation image; calculated by the function CalcMotionGradient
- mask – Mask image. It may be a conjunction of a valid gradient mask, obtained with CalcMotionGradient and the mask of the region, whose direction needs to be calculated
- mhi – Motion history image
- timestamp – Current time in milliseconds or other units, it is better to store time passed to UpdateMotionHistory before and reuse it here, because running UpdateMotionHistory and CalcMotionGradient on large images may take some time
- duration – Maximal duration of motion track in milliseconds, the same as UpdateMotionHistory
The function calculates the general motion direction in the selected region and returns the angle between 0 degrees and 360 degrees . At first the function builds the orientation histogram and finds the basic orientation as a coordinate of the histogram maximum. After that the function calculates the shift relative to the basic orientation as a weighted sum of all of the orientation vectors: the more recent the motion, the greater the weight. The resultant angle is a circular sum of the basic orientation and the shift.
CalcMotionGradient¶
- void cvCalcMotionGradient(const CvArr* mhi, CvArr* mask, CvArr* orientation, double delta1, double delta2, int apertureSize=3)¶
Calculates the gradient orientation of a motion history image.
Parameters: - mhi – Motion history image
- mask – Mask image; marks pixels where the motion gradient data is correct; output parameter
- orientation – Motion gradient orientation image; contains angles from 0 to ~360 degrees
- delta1 – See below
- delta2 – See below
- apertureSize – Aperture size of derivative operators used by the function: CV _ SCHARR, 1, 3, 5 or 7 (see Sobel )
The function calculates the derivatives
 and
and
 of
mhi
and then calculates gradient orientation as:
of
mhi
and then calculates gradient orientation as:

where both
 and
and
 signs are taken into account (as in the
CartToPolar
function). After that
mask
is filled to indicate where the orientation is valid (see the
delta1
and
delta2
description).
signs are taken into account (as in the
CartToPolar
function). After that
mask
is filled to indicate where the orientation is valid (see the
delta1
and
delta2
description).
The function finds the minimum (
 ) and maximum (
) and maximum (
 ) mhi values over each pixel
) mhi values over each pixel
 neighborhood and assumes the gradient is valid only if
neighborhood and assumes the gradient is valid only if

CalcOpticalFlowBM¶
- void cvCalcOpticalFlowBM(const CvArr* prev, const CvArr* curr, CvSize blockSize, CvSize shiftSize, CvSize max_range, int usePrevious, CvArr* velx, CvArr* vely)¶
Calculates the optical flow for two images by using the block matching method.
Parameters: - prev – First image, 8-bit, single-channel
- curr – Second image, 8-bit, single-channel
- blockSize – Size of basic blocks that are compared
- shiftSize – Block coordinate increments
- max_range – Size of the scanned neighborhood in pixels around the block
- usePrevious – Uses the previous (input) velocity field
- velx –
Horizontal component of the optical flow of

size, 32-bit floating-point, single-channel
- vely – Vertical component of the optical flow of the same size velx , 32-bit floating-point, single-channel
The function calculates the optical
flow for overlapped blocks
 pixels each, thus the velocity
fields are smaller than the original images. For every block in
prev
the functions tries to find a similar block in
curr
in some neighborhood of the original block or shifted by (velx(x0,y0),vely(x0,y0)) block as has been calculated by previous
function call (if
usePrevious=1
)
pixels each, thus the velocity
fields are smaller than the original images. For every block in
prev
the functions tries to find a similar block in
curr
in some neighborhood of the original block or shifted by (velx(x0,y0),vely(x0,y0)) block as has been calculated by previous
function call (if
usePrevious=1
)
CalcOpticalFlowHS¶
- void cvCalcOpticalFlowHS(const CvArr* prev, const CvArr* curr, int usePrevious, CvArr* velx, CvArr* vely, double lambda, CvTermCriteria criteria)¶
Calculates the optical flow for two images.
Parameters: - prev – First image, 8-bit, single-channel
- curr – Second image, 8-bit, single-channel
- usePrevious – Uses the previous (input) velocity field
- velx – Horizontal component of the optical flow of the same size as input images, 32-bit floating-point, single-channel
- vely – Vertical component of the optical flow of the same size as input images, 32-bit floating-point, single-channel
- lambda – Lagrangian multiplier
- criteria – Criteria of termination of velocity computing
The function computes the flow for every pixel of the first input image using the Horn and Schunck algorithm Horn81 .
CalcOpticalFlowLK¶
- void cvCalcOpticalFlowLK(const CvArr* prev, const CvArr* curr, CvSize winSize, CvArr* velx, CvArr* vely)¶
Calculates the optical flow for two images.
Parameters: - prev – First image, 8-bit, single-channel
- curr – Second image, 8-bit, single-channel
- winSize – Size of the averaging window used for grouping pixels
- velx – Horizontal component of the optical flow of the same size as input images, 32-bit floating-point, single-channel
- vely – Vertical component of the optical flow of the same size as input images, 32-bit floating-point, single-channel
The function computes the flow for every pixel of the first input image using the Lucas and Kanade algorithm Lucas81 .
CalcOpticalFlowPyrLK¶
- void cvCalcOpticalFlowPyrLK(const CvArr* prev, const CvArr* curr, CvArr* prevPyr, CvArr* currPyr, const CvPoint2D32f* prevFeatures, CvPoint2D32f* currFeatures, int count, CvSize winSize, int level, char* status, float* track_error, CvTermCriteria criteria, int flags)¶
Calculates the optical flow for a sparse feature set using the iterative Lucas-Kanade method with pyramids.
Parameters: - prev – First frame, at time t
- curr – Second frame, at time t + dt
- prevPyr – Buffer for the pyramid for the first frame. If the pointer is not NULL , the buffer must have a sufficient size to store the pyramid from level 1 to level level ; the total size of (image_width+8)*image_height/3 bytes is sufficient
- currPyr – Similar to prevPyr , used for the second frame
- prevFeatures – Array of points for which the flow needs to be found
- currFeatures – Array of 2D points containing the calculated new positions of the input features in the second image
- count – Number of feature points
- winSize – Size of the search window of each pyramid level
- level – Maximal pyramid level number. If 0 , pyramids are not used (single level), if 1 , two levels are used, etc
- status – Array. Every element of the array is set to 1 if the flow for the corresponding feature has been found, 0 otherwise
- track_error – Array of double numbers containing the difference between patches around the original and moved points. Optional parameter; can be NULL
- criteria – Specifies when the iteration process of finding the flow for each point on each pyramid level should be stopped
- flags –
Miscellaneous flags:
- CV_LKFLOWPyr_A_READY pyramid for the first frame is precalculated before the call
- CV_LKFLOWPyr_B_READY pyramid for the second frame is precalculated before the call
- CV_LKFLOW_INITIAL_GUESSES array B contains initial coordinates of features before the function call
The function implements the sparse iterative version of the Lucas-Kanade optical flow in pyramids Bouguet00 . It calculates the coordinates of the feature points on the current video frame given their coordinates on the previous frame. The function finds the coordinates with sub-pixel accuracy.
Both parameters prevPyr and currPyr comply with the following rules: if the image pointer is 0, the function allocates the buffer internally, calculates the pyramid, and releases the buffer after processing. Otherwise, the function calculates the pyramid and stores it in the buffer unless the flag CV_LKFLOWPyr_A[B]_READY is set. The image should be large enough to fit the Gaussian pyramid data. After the function call both pyramids are calculated and the readiness flag for the corresponding image can be set in the next call (i.e., typically, for all the image pairs except the very first one CV_LKFLOWPyr_A_READY is set).
CamShift¶
- int cvCamShift(const CvArr* prob_image, CvRect window, CvTermCriteria criteria, CvConnectedComp* comp, CvBox2D* box=NULL)¶
Finds the object center, size, and orientation.
Parameters: - prob_image – Back projection of object histogram (see CalcBackProject )
- window – Initial search window
- criteria – Criteria applied to determine when the window search should be finished
- comp – Resultant structure that contains the converged search window coordinates ( comp->rect field) and the sum of all of the pixels inside the window ( comp->area field)
- box – Circumscribed box for the object. If not NULL , it contains object size and orientation
The function implements the CAMSHIFT object tracking algrorithm Bradski98 . First, it finds an object center using MeanShift and, after that, calculates the object size and orientation. The function returns number of iterations made within MeanShift .
The CamShiftTracker class declared in cv.hpp implements the color object tracker that uses the function.
CvConDensation¶
ConDenstation state.
typedef struct CvConDensation
{
int MP; //Dimension of measurement vector
int DP; // Dimension of state vector
float* DynamMatr; // Matrix of the linear Dynamics system
float* State; // Vector of State
int SamplesNum; // Number of the Samples
float** flSamples; // array of the Sample Vectors
float** flNewSamples; // temporary array of the Sample Vectors
float* flConfidence; // Confidence for each Sample
float* flCumulative; // Cumulative confidence
float* Temp; // Temporary vector
float* RandomSample; // RandomVector to update sample set
CvRandState* RandS; // Array of structures to generate random vectors
} CvConDensation;
The structure CvConDensation stores the CONditional DENSity propagATION tracker state. The information about the algorithm can be found at http://www.dai.ed.ac.uk/CVonline/LOCAL_COPIES/ISARD1/condensation.html .
CreateConDensation¶
- CvConDensation* cvCreateConDensation(int dynam_params, int measure_params, int sample_count)¶
Allocates the ConDensation filter structure.
Parameters: - dynam_params – Dimension of the state vector
- measure_params – Dimension of the measurement vector
- sample_count – Number of samples
The function creates a CvConDensation structure and returns a pointer to the structure.
ConDensInitSampleSet¶
- void cvConDensInitSampleSet(CvConDensation* condens, CvMat* lower_bound, CvMat* upper_bound)¶
Initializes the sample set for the ConDensation algorithm.
Parameters: - condens – Pointer to a structure to be initialized
- lower_bound – Vector of the lower boundary for each dimension
- upper_bound – Vector of the upper boundary for each dimension
The function fills the samples arrays in the structure condens with values within the specified ranges.
CvKalman¶
- CvKalman¶
Kalman filter state.
typedef struct CvKalman
{
int MP; /* number of measurement vector dimensions */
int DP; /* number of state vector dimensions */
int CP; /* number of control vector dimensions */
/* backward compatibility fields */
#if 1
float* PosterState; /* =state_pre->data.fl */
float* PriorState; /* =state_post->data.fl */
float* DynamMatr; /* =transition_matrix->data.fl */
float* MeasurementMatr; /* =measurement_matrix->data.fl */
float* MNCovariance; /* =measurement_noise_cov->data.fl */
float* PNCovariance; /* =process_noise_cov->data.fl */
float* KalmGainMatr; /* =gain->data.fl */
float* PriorErrorCovariance;/* =error_cov_pre->data.fl */
float* PosterErrorCovariance;/* =error_cov_post->data.fl */
float* Temp1; /* temp1->data.fl */
float* Temp2; /* temp2->data.fl */
#endif
CvMat* state_pre; /* predicted state (x'(k)):
x(k)=A*x(k-1)+B*u(k) */
CvMat* state_post; /* corrected state (x(k)):
x(k)=x'(k)+K(k)*(z(k)-H*x'(k)) */
CvMat* transition_matrix; /* state transition matrix (A) */
CvMat* control_matrix; /* control matrix (B)
(it is not used if there is no control)*/
CvMat* measurement_matrix; /* measurement matrix (H) */
CvMat* process_noise_cov; /* process noise covariance matrix (Q) */
CvMat* measurement_noise_cov; /* measurement noise covariance matrix (R) */
CvMat* error_cov_pre; /* priori error estimate covariance matrix (P'(k)):
P'(k)=A*P(k-1)*At + Q*/
CvMat* gain; /* Kalman gain matrix (K(k)):
K(k)=P'(k)*Ht*inv(H*P'(k)*Ht+R)*/
CvMat* error_cov_post; /* posteriori error estimate covariance matrix (P(k)):
P(k)=(I-K(k)*H)*P'(k) */
CvMat* temp1; /* temporary matrices */
CvMat* temp2;
CvMat* temp3;
CvMat* temp4;
CvMat* temp5;
}
CvKalman;
The structure CvKalman is used to keep the Kalman filter state. It is created by the CreateKalman function, updated by the KalmanPredict and KalmanCorrect functions and released by the ReleaseKalman function . Normally, the structure is used for the standard Kalman filter (notation and the formulas below are borrowed from the excellent Kalman tutorial Welch95 )

where:

 and
and
 are normally-distributed process and measurement noise, respectively:
are normally-distributed process and measurement noise, respectively:
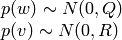
that is,
 process noise covariance matrix, constant or variable,
process noise covariance matrix, constant or variable,
 measurement noise covariance matrix, constant or variable
measurement noise covariance matrix, constant or variable
In the case of the standard Kalman filter, all of the matrices: A, B, H, Q and R are initialized once after the CvKalman structure is allocated via CreateKalman . However, the same structure and the same functions may be used to simulate the extended Kalman filter by linearizing the extended Kalman filter equation in the current system state neighborhood, in this case A, B, H (and, probably, Q and R) should be updated on every step.
CreateKalman¶
- CvKalman* cvCreateKalman(int dynam_params, int measure_params, int control_params=0)¶
Allocates the Kalman filter structure.
Parameters: - dynam_params – dimensionality of the state vector
- measure_params – dimensionality of the measurement vector
- control_params – dimensionality of the control vector
The function allocates CvKalman and all its matrices and initializes them somehow.
KalmanCorrect¶
- const CvMat* cvKalmanCorrect(CvKalman* kalman, const CvMat* measurement)¶
Adjusts the model state.
Parameters: - kalman – Pointer to the structure to be updated
- measurement – CvMat containing the measurement vector
The function adjusts the stochastic model state on the basis of the given measurement of the model state:
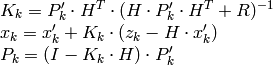
where
 |
given measurement ( mesurement parameter) |
|---|---|
 |
Kalman “gain” matrix. |
The function stores the adjusted state at kalman->state_post and returns it on output.
Example. Using Kalman filter to track a rotating point
#include "cv.h"
#include "highgui.h"
#include <math.h>
int main(int argc, char** argv)
{
/* A matrix data */
const float A[] = { 1, 1, 0, 1 };
IplImage* img = cvCreateImage( cvSize(500,500), 8, 3 );
CvKalman* kalman = cvCreateKalman( 2, 1, 0 );
/* state is (phi, delta_phi) - angle and angle increment */
CvMat* state = cvCreateMat( 2, 1, CV_32FC1 );
CvMat* process_noise = cvCreateMat( 2, 1, CV_32FC1 );
/* only phi (angle) is measured */
CvMat* measurement = cvCreateMat( 1, 1, CV_32FC1 );
CvRandState rng;
int code = -1;
cvRandInit( &rng, 0, 1, -1, CV_RAND_UNI );
cvZero( measurement );
cvNamedWindow( "Kalman", 1 );
for(;;)
{
cvRandSetRange( &rng, 0, 0.1, 0 );
rng.disttype = CV_RAND_NORMAL;
cvRand( &rng, state );
memcpy( kalman->transition_matrix->data.fl, A, sizeof(A));
cvSetIdentity( kalman->measurement_matrix, cvRealScalar(1) );
cvSetIdentity( kalman->process_noise_cov, cvRealScalar(1e-5) );
cvSetIdentity( kalman->measurement_noise_cov, cvRealScalar(1e-1) );
cvSetIdentity( kalman->error_cov_post, cvRealScalar(1));
/* choose random initial state */
cvRand( &rng, kalman->state_post );
rng.disttype = CV_RAND_NORMAL;
for(;;)
{
#define calc_point(angle) \
cvPoint( cvRound(img->width/2 + img->width/3*cos(angle)), \
cvRound(img->height/2 - img->width/3*sin(angle)))
float state_angle = state->data.fl[0];
CvPoint state_pt = calc_point(state_angle);
/* predict point position */
const CvMat* prediction = cvKalmanPredict( kalman, 0 );
float predict_angle = prediction->data.fl[0];
CvPoint predict_pt = calc_point(predict_angle);
float measurement_angle;
CvPoint measurement_pt;
cvRandSetRange( &rng,
0,
sqrt(kalman->measurement_noise_cov->data.fl[0]),
0 );
cvRand( &rng, measurement );
/* generate measurement */
cvMatMulAdd( kalman->measurement_matrix, state, measurement, measurement );
measurement_angle = measurement->data.fl[0];
measurement_pt = calc_point(measurement_angle);
/* plot points */
#define draw_cross( center, color, d ) \
cvLine( img, cvPoint( center.x - d, center.y - d ), \
cvPoint( center.x + d, center.y + d ), \
color, 1, 0 ); \
cvLine( img, cvPoint( center.x + d, center.y - d ), \
cvPoint( center.x - d, center.y + d ), \
color, 1, 0 )
cvZero( img );
draw_cross( state_pt, CV_RGB(255,255,255), 3 );
draw_cross( measurement_pt, CV_RGB(255,0,0), 3 );
draw_cross( predict_pt, CV_RGB(0,255,0), 3 );
cvLine( img, state_pt, predict_pt, CV_RGB(255,255,0), 3, 0 );
/* adjust Kalman filter state */
cvKalmanCorrect( kalman, measurement );
cvRandSetRange( &rng,
0,
sqrt(kalman->process_noise_cov->data.fl[0]),
0 );
cvRand( &rng, process_noise );
cvMatMulAdd( kalman->transition_matrix,
state,
process_noise,
state );
cvShowImage( "Kalman", img );
code = cvWaitKey( 100 );
if( code > 0 ) /* break current simulation by pressing a key */
break;
}
if( code == 27 ) /* exit by ESCAPE */
break;
}
return 0;
}
KalmanPredict¶
- const CvMat* cvKalmanPredict(CvKalman* kalman, const CvMat* control=NULL)¶
Estimates the subsequent model state.
Parameters: - kalman – Kalman filter state
- control – Control vector
 , should be NULL iff there is no external control ( control_params =0)
, should be NULL iff there is no external control ( control_params =0)
The function estimates the subsequent stochastic model state by its current state and stores it at kalman->state_pre :
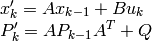
where
 |
is predicted state kalman->state_pre , |
|---|---|
 |
is corrected state on the previous step kalman->state_post (should be initialized somehow in the beginning, zero vector by default), |
|
is external control ( control parameter), |
 |
is priori error covariance matrix kalman->error_cov_pre |
 |
is posteriori error covariance matrix on the previous step kalman->error_cov_post (should be initialized somehow in the beginning, identity matrix by default), |
The function returns the estimated state.
KalmanUpdateByMeasurement¶
Synonym for KalmanCorrect
KalmanUpdateByTime¶
Synonym for KalmanPredict
MeanShift¶
- int cvMeanShift(const CvArr* prob_image, CvRect window, CvTermCriteria criteria, CvConnectedComp* comp)¶
Finds the object center on back projection.
Parameters: - prob_image – Back projection of the object histogram (see CalcBackProject )
- window – Initial search window
- criteria – Criteria applied to determine when the window search should be finished
- comp – Resultant structure that contains the converged search window coordinates ( comp->rect field) and the sum of all of the pixels inside the window ( comp->area field)
The function iterates to find the object center given its back projection and initial position of search window. The iterations are made until the search window center moves by less than the given value and/or until the function has done the maximum number of iterations. The function returns the number of iterations made.
ReleaseConDensation¶
- void cvReleaseConDensation(CvConDensation** condens)¶
Deallocates the ConDensation filter structure.
Parameters: - condens – Pointer to the pointer to the structure to be released
The function releases the structure condens ) and frees all memory previously allocated for the structure.
ReleaseKalman¶
- void cvReleaseKalman(CvKalman** kalman)¶
Deallocates the Kalman filter structure.
Parameters: - kalman – double pointer to the Kalman filter structure
The function releases the structure CvKalman and all of the underlying matrices.
SegmentMotion¶
- CvSeq* cvSegmentMotion(const CvArr* mhi, CvArr* seg_mask, CvMemStorage* storage, double timestamp, double seg_thresh)¶
Segments a whole motion into separate moving parts.
Parameters: - mhi – Motion history image
- seg_mask – Image where the mask found should be stored, single-channel, 32-bit floating-point
- storage – Memory storage that will contain a sequence of motion connected components
- timestamp – Current time in milliseconds or other units
- seg_thresh – Segmentation threshold; recommended to be equal to the interval between motion history “steps” or greater
The function finds all of the motion segments and marks them in seg_mask with individual values (1,2,...). It also returns a sequence of CvConnectedComp structures, one for each motion component. After that the motion direction for every component can be calculated with CalcGlobalOrientation using the extracted mask of the particular component Cmp .
SnakeImage¶
- void cvSnakeImage(const IplImage* image, CvPoint* points, int length, float* alpha, float* beta, float* gamma, int coeff_usage, CvSize win, CvTermCriteria criteria, int calc_gradient=1)¶
Changes the contour position to minimize its energy.
Parameters: - image – The source image or external energy field
- points – Contour points (snake)
- length – Number of points in the contour
- alpha – Weight[s] of continuity energy, single float or array of length floats, one for each contour point
- beta – Weight[s] of curvature energy, similar to alpha
- gamma – Weight[s] of image energy, similar to alpha
- coeff_usage –
Different uses of the previous three parameters:
- CV_VALUE indicates that each of alpha, beta, gamma is a pointer to a single value to be used for all points;
- CV_ARRAY indicates that each of alpha, beta, gamma is a pointer to an array of coefficients different for all the points of the snake. All the arrays must have the size equal to the contour size.
- win – Size of neighborhood of every point used to search the minimum, both win.width and win.height must be odd
- criteria – Termination criteria
- calc_gradient – Gradient flag; if not 0, the function calculates the gradient magnitude for every image pixel and consideres it as the energy field, otherwise the input image itself is considered
The function updates the snake in order to minimize its total energy that is a sum of internal energy that depends on the contour shape (the smoother contour is, the smaller internal energy is) and external energy that depends on the energy field and reaches minimum at the local energy extremums that correspond to the image edges in the case of using an image gradient.
The parameter criteria.epsilon is used to define the minimal number of points that must be moved during any iteration to keep the iteration process running.
If at some iteration the number of moved points is less than criteria.epsilon or the function performed criteria.max_iter iterations, the function terminates.
UpdateMotionHistory¶
- void cvUpdateMotionHistory(const CvArr* silhouette, CvArr* mhi, double timestamp, double duration)¶
Updates the motion history image by a moving silhouette.
Parameters: - silhouette – Silhouette mask that has non-zero pixels where the motion occurs
- mhi – Motion history image, that is updated by the function (single-channel, 32-bit floating-point)
- timestamp – Current time in milliseconds or other units
- duration – Maximal duration of the motion track in the same units as timestamp
The function updates the motion history image as following:

That is, MHI pixels where motion occurs are set to the current timestamp, while the pixels where motion happened far ago are cleared.
Help and Feedback
You did not find what you were looking for?- Ask a question in the user group/mailing list.
- If you think something is missing or wrong in the documentation, please file a bug report.
![]()
Table Of Contents
- Motion Analysis and Object Tracking
- CalcGlobalOrientation
- CalcMotionGradient
- CalcOpticalFlowBM
- CalcOpticalFlowHS
- CalcOpticalFlowLK
- CalcOpticalFlowPyrLK
- CamShift
- CvConDensation
- CreateConDensation
- ConDensInitSampleSet
- CvKalman
- CreateKalman
- KalmanCorrect
- KalmanPredict
- KalmanUpdateByMeasurement
- KalmanUpdateByTime
- MeanShift
- ReleaseConDensation
- ReleaseKalman
- SegmentMotion
- SnakeImage
- UpdateMotionHistory
Previous topic
Next topic
highgui. High-level GUI and Media I/O