Utility and System Functions and Macros¶
Error Handling¶
Error handling in OpenCV is similar to IPL (Image Processing Library). In the case of an error, functions do not return the error code. Instead, they raise an error using CV_ERROR macro that calls Error that, in its turn, sets the error status with SetErrStatus and calls a standard or user-defined error handler (that can display a message box, write to log, etc., see RedirectError ). There is a global variable, one per each program thread, that contains current error status (an integer value). The status can be retrieved with the GetErrStatus function.
There are three modes of error handling (see SetErrMode and GetErrMode ):
- Leaf . The program is terminated after the error handler is called. This is the default value. It is useful for debugging, as the error is signalled immediately after it occurs. However, for production systems, other two methods may be preferable as they provide more control.
- Parent . The program is not terminated, but the error handler is called. The stack is unwound (it is done w/o using a C++ exception mechanism). The user may check error code after calling the CxCore function with GetErrStatus and react.
- Silent . Similar to Parent mode, but no error handler is called.
Actually, the semantics of the Leaf and Parent modes are implemented by error handlers and the above description is true for them. GuiBoxReport behaves slightly differently, and some custom error handlers may implement quite different semantics.
Macros for raising an error, checking for errors, etc.
/* special macros for enclosing processing statements within a function and separating
them from prologue (resource initialization) and epilogue (guaranteed resource release) */
#define __BEGIN__ {
#define __END__ goto exit; exit: ; }
/* proceeds to "resource release" stage */
#define EXIT goto exit
/* Declares locally the function name for CV_ERROR() use */
#define CV_FUNCNAME( Name ) \
static char cvFuncName[] = Name
/* Raises an error within the current context */
#define CV_ERROR( Code, Msg ) \
/* Checks status after calling CXCORE function */
#define CV_CHECK() \
/* Provies shorthand for CXCORE function call and CV_CHECK() */
#define CV_CALL( Statement ) \
/* Checks some condition in both debug and release configurations */
#define CV_ASSERT( Condition ) \
/* these macros are similar to their CV_... counterparts, but they
do not need exit label nor cvFuncName to be defined */
#define OPENCV_ERROR(status,func_name,err_msg) ...
#define OPENCV_ERRCHK(func_name,err_msg) ...
#define OPENCV_ASSERT(condition,func_name,err_msg) ...
#define OPENCV_CALL(statement) ...
Instead of a discussion, below is a documented example of a typical CXCORE function and an example of the function use.
Example: Use of Error Handling Macros¶
#include "cxcore.h"
#include <stdio.h>
void cvResizeDCT( CvMat* input_array, CvMat* output_array )
{
CvMat* temp_array = 0; // declare pointer that should be released anyway.
CV_FUNCNAME( "cvResizeDCT" ); // declare cvFuncName
__BEGIN__; // start processing. There may be some declarations just after
// this macro, but they could not be accessed from the epilogue.
if( !CV_IS_MAT(input_array) || !CV_IS_MAT(output_array) )
// use CV_ERROR() to raise an error
CV_ERROR( CV_StsBadArg,
"input_array or output_array are not valid matrices" );
// some restrictions that are going to be removed later, may be checked
// with CV_ASSERT()
CV_ASSERT( input_array->rows == 1 && output_array->rows == 1 );
// use CV_CALL for safe function call
CV_CALL( temp_array = cvCreateMat( input_array->rows,
MAX(input_array->cols,
output_array->cols),
input_array->type ));
if( output_array->cols > input_array->cols )
CV_CALL( cvZero( temp_array ));
temp_array->cols = input_array->cols;
CV_CALL( cvDCT( input_array, temp_array, CV_DXT_FORWARD ));
temp_array->cols = output_array->cols;
CV_CALL( cvDCT( temp_array, output_array, CV_DXT_INVERSE ));
CV_CALL( cvScale( output_array,
output_array,
1./sqrt((double)input_array->cols*output_array->cols), 0 ));
__END__; // finish processing. Epilogue follows after the macro.
// release temp_array. If temp_array has not been allocated
// before an error occured, cvReleaseMat
// takes care of it and does nothing in this case.
cvReleaseMat( &temp_array );
}
int main( int argc, char** argv )
{
CvMat* src = cvCreateMat( 1, 512, CV_32F );
#if 1 /* no errors */
CvMat* dst = cvCreateMat( 1, 256, CV_32F );
#else
CvMat* dst = 0; /* test error processing mechanism */
#endif
cvSet( src, cvRealScalar(1.), 0 );
#if 0 /* change 0 to 1 to suppress error handler invocation */
cvSetErrMode( CV_ErrModeSilent );
#endif
cvResizeDCT( src, dst ); // if some error occurs, the message
// box will popup, or a message will be
// written to log, or some user-defined
// processing will be done
if( cvGetErrStatus() < 0 )
printf("Some error occured" );
else
printf("Everything is OK" );
return 0;
}
GetErrStatus¶
- int cvGetErrStatus(void)¶
Returns the current error status.
The function returns the current error status - the value set with the last SetErrStatus call. Note that in Leaf mode, the program terminates immediately after an error occurs, so to always gain control after the function call, one should call SetErrMode and set the Parent or Silent error mode.
SetErrStatus¶
- void cvSetErrStatus(int status)¶
Sets the error status.
Parameters: - status – The error status
The function sets the error status to the specified value. Mostly, the function is used to reset the error status (set to it CV_StsOk ) to recover after an error. In other cases it is more natural to call Error or CV_ERROR .
GetErrMode¶
- int cvGetErrMode(void)¶
Returns the current error mode.
The function returns the current error mode - the value set with the last SetErrMode call.
SetErrMode¶
..
- int cvSetErrMode(int mode)¶
Sets the error mode.
#define CV_ErrModeLeaf 0 #define CV_ErrModeParent 1 #define CV_ErrModeSilent 2
param mode: The error mode
The function sets the specified error mode. For descriptions of different error modes, see the beginning of the error section.
Error¶
- int cvError(int status, const char* func_name, const char* err_msg, const char* filename, int line)¶
Raises an error.
Parameters: - status – The error status
- func_name – Name of the function where the error occured
- err_msg – Additional information/diagnostics about the error
- filename – Name of the file where the error occured
- line – Line number, where the error occured
The function sets the error status to the specified value (via SetErrStatus ) and, if the error mode is not Silent , calls the error handler.
ErrorStr¶
- const char* cvErrorStr(int status)¶
Returns textual description of an error status code.
Parameters: - status – The error status
The function returns the textual description for the specified error status code. In the case of unknown status, the function returns a NULL pointer.
RedirectError¶
- CvErrorCallback cvRedirectError(CvErrorCallback error_handler, void* userdata=NULL, void** prevUserdata=NULL)¶
Sets a new error handler.
Parameters: - error_handler – The new error _ handler
- userdata – Arbitrary pointer that is transparently passed to the error handler
- prevUserdata – Pointer to the previously assigned user data pointer
typedef int (CV_CDECL *CvErrorCallback)( int status, const char* func_name,
const char* err_msg, const char* file_name, int line );
The function sets a new error handler that can be one of the standard handlers or a custom handler that has a specific interface. The handler takes the same parameters as the Error function. If the handler returns a non-zero value, the program is terminated; otherwise, it continues. The error handler may check the current error mode with GetErrMode to make a decision.
cvNulDevReport cvStdErrReport cvGuiBoxReport¶
- int cvNulDevReport(int status, const char* func_name, const char* err_msg, const char* file_name, int line, void* userdata)¶
- int cvStdErrReport(int status, const char* func_name, const char* err_msg, const char* file_name, int line, void* userdata)¶
- int cvGuiBoxReport(int status, const char* func_name, const char* err_msg, const char* file_name, int line, void* userdata)¶
Provide standard error handling.
Parameters: - status – The error status
- func_name – Name of the function where the error occured
- err_msg – Additional information/diagnostics about the error
- filename – Name of the file where the error occured
- line – Line number, where the error occured
- userdata – Pointer to the user data. Ignored by the standard handlers
The functions cvNullDevReport , cvStdErrReport , and cvGuiBoxReport provide standard error handling. cvGuiBoxReport is the default error handler on Win32 systems, cvStdErrReport is the default on other systems. cvGuiBoxReport pops up a message box with the error description and suggest a few options. Below is an example message box that may be recieved with the sample code above, if one introduces an error as described in the sample.
Error Message Box
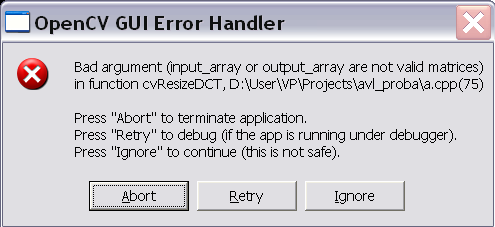
If the error handler is set to cvStdErrReport , the above message will be printed to standard error output and the program will be terminated or continued, depending on the current error mode.
Error Message printed to Standard Error Output (in ``Leaf`` mode)
OpenCV ERROR: Bad argument (input_array or output_array are not valid matrices)
in function cvResizeDCT, D:UserVPProjectsavl_probaa.cpp(75)
Terminating the application...
Alloc¶
- void* cvAlloc(size_t size)¶
Allocates a memory buffer.
Parameters: - size – Buffer size in bytes
The function allocates size bytes and returns a pointer to the allocated buffer. In the case of an error the function reports an error and returns a NULL pointer. By default, cvAlloc calls icvAlloc which itself calls malloc . However it is possible to assign user-defined memory allocation/deallocation functions using the SetMemoryManager function.
Free¶
- void cvFree(void** ptr)¶
Deallocates a memory buffer.
Parameters: - ptr – Double pointer to released buffer
The function deallocates a memory buffer allocated by Alloc . It clears the pointer to buffer upon exit, which is why the double pointer is used. If the *buffer is already NULL, the function does nothing.
GetTickCount¶
- int64 cvGetTickCount(void)¶
Returns the number of ticks.
The function returns number of the ticks starting from some platform-dependent event (number of CPU ticks from the startup, number of milliseconds from 1970th year, etc.). The function is useful for accurate measurement of a function/user-code execution time. To convert the number of ticks to time units, use GetTickFrequency .
GetTickFrequency¶
- double cvGetTickFrequency(void)¶
Returns the number of ticks per microsecond.
The function returns the number of ticks per microsecond. Thus, the quotient of GetTickCount and GetTickFrequency will give the number of microseconds starting from the platform-dependent event.
RegisterModule¶
..
- int cvRegisterModule(const CvModuleInfo* moduleInfo)¶
Registers another module.
typedef struct CvPluginFuncInfo {
void** func_addr; void* default_func_addr; const char* func_names; int search_modules; int loaded_from;
} CvPluginFuncInfo;
typedef struct CvModuleInfo {
struct CvModuleInfo* next; const char* name; const char* version; CvPluginFuncInfo* func_tab;
} CvModuleInfo;
param moduleInfo: Information about the module
The function adds a module to the list of registered modules. After the module is registered, information about it can be retrieved using the GetModuleInfo function. Also, the registered module makes full use of optimized plugins (IPP, MKL, ...), supported by CXCORE. CXCORE itself, CV (computer vision), CVAUX (auxilary computer vision), and HIGHGUI (visualization and image/video acquisition) are examples of modules. Registration is usually done when the shared library is loaded. See cxcore/src/cxswitcher.cpp and cv/src/cvswitcher.cpp for details about how registration is done and look at cxcore/src/cxswitcher.cpp , cxcore/src/_cxipp.h on how IPP and MKL are connected to the modules.
GetModuleInfo¶
- void cvGetModuleInfo(const char* moduleName, const char** version, const char** loadedAddonPlugins)¶
Retrieves information about registered module(s) and plugins.
Parameters: - moduleName – Name of the module of interest, or NULL, which means all the modules
- version – The output parameter. Information about the module(s), including version
- loadedAddonPlugins – The list of names and versions of the optimized plugins that CXCORE was able to find and load
The function returns information about one or all of the registered modules. The returned information is stored inside the libraries, so the user should not deallocate or modify the returned text strings.
UseOptimized¶
- int cvUseOptimized(int onoff)¶
Switches between optimized/non-optimized modes.
Parameters: - onoff – Use optimized (
 ) or not (
) or not (  )
)
- onoff – Use optimized (
The function switches between the mode, where only pure C implementations from cxcore, OpenCV, etc. are used, and the mode, where IPP and MKL functions are used if available. When cvUseOptimized(0) is called, all the optimized libraries are unloaded. The function may be useful for debugging, IPP and MKL upgrading on the fly, online speed comparisons, etc. It returns the number of optimized functions loaded. Note that by default, the optimized plugins are loaded, so it is not necessary to call cvUseOptimized(1) in the beginning of the program (actually, it will only increase the startup time).
SetMemoryManager¶
..
- void cvSetMemoryManager(CvAllocFunc allocFunc=NULL, CvFreeFunc freeFunc=NULL, void* userdata=NULL)¶
Accesses custom/default memory managing functions.
typedef void* (CV_CDECL CvAllocFunc)(size_t size, void userdata); typedef int (CV_CDECL CvFreeFunc)(void pptr, void* userdata);
param allocFunc: Allocation function; the interface is similar to malloc , except that userdata may be used to determine the context param freeFunc: Deallocation function; the interface is similar to free param userdata: User data that is transparently passed to the custom functions
The function sets user-defined memory managment functions (substitutes for malloc and free ) that will be called by cvAlloc, cvFree and higher-level functions (e.g., cvCreateImage ). Note that the function should be called when there is data allocated using cvAlloc . Also, to avoid infinite recursive calls, it is not allowed to call cvAlloc and Free from the custom allocation/deallocation functions.
If the alloc_func and free_func pointers are NULL , the default memory managing functions are restored.
SetIPLAllocators¶
\
\
- void cvSetIPLAllocators(Cv_iplCreateImageHeader create_header, Cv_iplAllocateImageData allocate_data, Cv_iplDeallocate deallocate, Cv_iplCreateROI create_roi, Cv_iplCloneImage clone_image)¶
Switches to IPL functions for image allocation/deallocation.
- typedef IplImage* (CV_STDCALL* Cv_iplCreateImageHeader)
- (int,int,int,char*,char*,int,int,int,int,int, IplROI*,IplImage*,void*,IplTileInfo*);
typedef void (CV_STDCALL* Cv_iplAllocateImageData)(IplImage*,int,int); typedef void (CV_STDCALL* Cv_iplDeallocate)(IplImage*,int); typedef IplROI* (CV_STDCALL* Cv_iplCreateROI)(int,int,int,int,int); typedef IplImage* (CV_STDCALL* Cv_iplCloneImage)(const IplImage*);
#define CV_TURN_ON_IPL_COMPATIBILITY() cvSetIPLAllocators( iplCreateImageHeader, iplAllocateImage, iplDeallocate, iplCreateROI, iplCloneImage )
param create_header: Pointer to iplCreateImageHeader param allocate_data: Pointer to iplAllocateImage param deallocate: Pointer to iplDeallocate param create_roi: Pointer to iplCreateROI param clone_image: Pointer to iplCloneImage
The function causes CXCORE to use IPL functions for image allocation/deallocation operations. For convenience, there is the wrapping macro CV_TURN_ON_IPL_COMPATIBILITY . The function is useful for applications where IPL and CXCORE/OpenCV are used together and still there are calls to iplCreateImageHeader , etc. The function is not necessary if IPL is called only for data processing and all the allocation/deallocation is done by CXCORE, or if all the allocation/deallocation is done by IPL and some of OpenCV functions are used to process the data.
Help and Feedback
You did not find what you were looking for?- Ask a question in the user group/mailing list.
- If you think something is missing or wrong in the documentation, please file a bug report.