離散変換
■ DFT
離散フーリエ変換および,逆離散フーリエ変換とは,離散化されたデータに対するフーリエ変換である. これは,1次元信号や2次元画像の周波集解析,データ圧縮,畳み込み定理を利用した(F(f*g)=F(f)*F(g))高速な乗算などに利用される. OpenCVでは,関数cvDFT()よよって,順変換,逆変換が可能である.サンプル
離散フーリエ変換 cvDFT
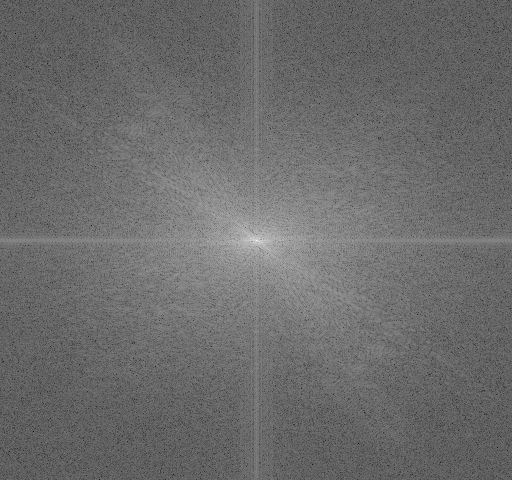
離散フーリエ変換を用いて,振幅画像を生成する.これは, OpenCV付属のサンプルコード(とほぼ同一)である.
サンプルコード
#include <cv.h> #include <highgui.h> /* プロトタイプ宣言 */ void cvShiftDFT (CvArr * src_arr, CvArr * dst_arr); int main (int argc, char **argv) { IplImage *src_img; IplImage *realInput; IplImage *imaginaryInput; IplImage *complexInput; IplImage *image_Re; IplImage *image_Im; int dft_M, dft_N; CvMat *dft_A, tmp; double m, M; src_img = cvLoadImage (argv[1], CV_LOAD_IMAGE_GRAYSCALE); if (!src_img) return -1; realInput = cvCreateImage (cvGetSize (src_img), IPL_DEPTH_64F, 1); imaginaryInput = cvCreateImage (cvGetSize (src_img), IPL_DEPTH_64F, 1); complexInput = cvCreateImage (cvGetSize (src_img), IPL_DEPTH_64F, 2); // (1)入力画像を実数配列にコピーし,虚数配列とマージして複素数平面を構成 cvScale (src_img, realInput, 1.0, 0.0); cvZero (imaginaryInput); cvMerge (realInput, imaginaryInput, NULL, NULL, complexInput); // (2)DFT用の最適サイズを計算し,そのサイズで行列を確保する dft_M = cvGetOptimalDFTSize (src_img->height - 1); dft_N = cvGetOptimalDFTSize (src_img->width - 1); dft_A = cvCreateMat (dft_M, dft_N, CV_64FC2); image_Re = cvCreateImage (cvSize (dft_N, dft_M), IPL_DEPTH_64F, 1); image_Im = cvCreateImage (cvSize (dft_N, dft_M), IPL_DEPTH_64F, 1); // (3)複素数平面をdft_Aにコピーし,残りの行列右側部分を0で埋める cvGetSubRect (dft_A, &tmp, cvRect (0, 0, src_img->width, src_img->height)); cvCopy (complexInput, &tmp, NULL); if (dft_A->cols > src_img->width) { cvGetSubRect (dft_A, &tmp, cvRect (src_img->width, 0, dft_A->cols - src_img->width, src_img->height)); cvZero (&tmp); } // (4)離散フーリエ変換を行い,その結果を実数部分と虚数部分に分解 cvDFT (dft_A, dft_A, CV_DXT_FORWARD, complexInput->height); cvSplit (dft_A, image_Re, image_Im, 0, 0); // (5)スペクトルの振幅を計算 Mag = sqrt(Re^2 + Im^2) cvPow (image_Re, image_Re, 2.0); cvPow (image_Im, image_Im, 2.0); cvAdd (image_Re, image_Im, image_Re, NULL); cvPow (image_Re, image_Re, 0.5); // (6)振幅の対数をとる log(1 + Mag) cvAddS (image_Re, cvScalarAll (1.0), image_Re, NULL); cvLog (image_Re, image_Re); // (7)原点(直流成分)が画像の中心にくるように,画像の象限を入れ替える cvShiftDFT (image_Re, image_Re); // (8)振幅画像のピクセル値が0.0-1.0に分布するようにスケーリング cvMinMaxLoc (image_Re, &m, &M, NULL, NULL, NULL); cvScale (image_Re, image_Re, 1.0 / (M - m), 1.0 * (-m) / (M - m)); cvNamedWindow ("Image", CV_WINDOW_AUTOSIZE); cvShowImage ("Image", src_img); cvNamedWindow ("Magnitude", CV_WINDOW_AUTOSIZE); cvShowImage ("Magnitude", image_Re); cvWaitKey (0); cvDestroyWindow ("Image"); cvDestroyWindow ("Magnitude"); cvReleaseImage (&src_img); cvReleaseImage (&realInput); cvReleaseImage (&imaginaryInput); cvReleaseImage (&complexInput); cvReleaseImage (&image_Re); cvReleaseImage (&image_Im); cvReleaseMat (&dft_A); return 0; } /* 原点(直流成分)が画像の中心にくるように,画像の象限を入れ替える関数. src_arr, dst_arr は同じサイズ,タイプの配列 */ void cvShiftDFT (CvArr * src_arr, CvArr * dst_arr) { CvMat *tmp = 0; CvMat q1stub, q2stub; CvMat q3stub, q4stub; CvMat d1stub, d2stub; CvMat d3stub, d4stub; CvMat *q1, *q2, *q3, *q4; CvMat *d1, *d2, *d3, *d4; CvSize size = cvGetSize (src_arr); CvSize dst_size = cvGetSize (dst_arr); int cx, cy; if (dst_size.width != size.width || dst_size.height != size.height) { cvError (CV_StsUnmatchedSizes, "cvShiftDFT", "Source and Destination arrays must have equal sizes", __FILE__, __LINE__); } // (9)インプレースモード用のテンポラリバッファ if (src_arr == dst_arr) { tmp = cvCreateMat (size.height / 2, size.width / 2, cvGetElemType (src_arr)); } cx = size.width / 2; /* 画像中心 */ cy = size.height / 2; // (10)1〜4象限を表す配列と,そのコピー先 q1 = cvGetSubRect (src_arr, &q1stub, cvRect (0, 0, cx, cy)); q2 = cvGetSubRect (src_arr, &q2stub, cvRect (cx, 0, cx, cy)); q3 = cvGetSubRect (src_arr, &q3stub, cvRect (cx, cy, cx, cy)); q4 = cvGetSubRect (src_arr, &q4stub, cvRect (0, cy, cx, cy)); d1 = cvGetSubRect (src_arr, &d1stub, cvRect (0, 0, cx, cy)); d2 = cvGetSubRect (src_arr, &d2stub, cvRect (cx, 0, cx, cy)); d3 = cvGetSubRect (src_arr, &d3stub, cvRect (cx, cy, cx, cy)); d4 = cvGetSubRect (src_arr, &d4stub, cvRect (0, cy, cx, cy)); // (11)実際の象限の入れ替え if (src_arr != dst_arr) { if (!CV_ARE_TYPES_EQ (q1, d1)) { cvError (CV_StsUnmatchedFormats, "cvShiftDFT", "Source and Destination arrays must have the same format", __FILE__, __LINE__); } cvCopy (q3, d1, 0); cvCopy (q4, d2, 0); cvCopy (q1, d3, 0); cvCopy (q2, d4, 0); } else { /* インプレースモード */ cvCopy (q3, tmp, 0); cvCopy (q1, q3, 0); cvCopy (tmp, q1, 0); cvCopy (q4, tmp, 0); cvCopy (q2, q4, 0); cvCopy (tmp, q2, 0); } }
// (1)入力画像を実数配列にコピーし,虚数配列とマージして複素数平面を構成
入力画像(グレースケール)を実数配列にコピーし,0でクリアされた虚数配列とマージして,複素数平面データを格納する画像構造体にコピーする.
入力画像から実数配列へのコピーは,入力と出力で配列の方が異なるため,関数cvCopy()ではなく関数cvScale()を用いる.
// (2)DFT用の最適サイズを計算し,そのサイズで行列を確保する
関数cvGetOptimalDFTSize()により,高速に計算可能でかつ,入力画像が治まる最小サイズを求め,そのサイズで行列を確保する.
また,離散フーリエ変換後のデータを分離するための画像構造体,image_Re,image_Imも同時に確保する.
// (3)複素数平面をdft_Aにコピーし,残りの行列右側部分を0で埋める
先の求めた行列dft_Aに,複素数平面のデータをコピーし,余白部分である行列の右側を0で埋める.
後に呼び出す関数cvDFT()では,nonzero_rowsパラメータを利用するので,下側の余白を0で埋める必要は無い.
// (4)離散フーリエ変換を行い,その結果を実数部分と虚数部分に分解
実際に,dft_Aに対して離散フーリエ変換を行い,その結果をdft_Aに返す.
そして,その結果を実数部分と虚数部分に分解する.
// (5)スペクトルの振幅を計算 Mag = sqrt(Re^2 + Im^2)
実数部分と虚数部分の二乗和の平方をとり,振幅(Magnitude)を計算する.
// (6)振幅の対数をとる log(1 + Mag)
一般的に,画像では振幅を持つ周波数成分と比べて直流成分が非常に多く,実際の振幅をそのまま表示しようとすると,直流成分以外のデータが0になってしまう.
そこで,(1以上の値になるようにして)振幅の対数を計算することで,成分同士の格差を緩和する.
// (7)原点(直流成分)が画像の中心にくるように,画像の象限を入れ替える
このまま,画像を表示すると原点となる直流成分が画面端になるので,それが中心に来るように,画像を象限単位で並び替える.
// (8)振幅画像のピクセル値が0.0〜1.0に分布するようにスケーリング
作成された振幅画像が,0.0〜1.0の範囲に分布するようにスケーリングを行い,振幅画像とその元画像を表示する.
何かキーが押されるまで待つ.
ちなみに,この振幅画像は,1ピクセルがIPL_DEPTH_64Fで定義されるデータ型なので,このままでは保存することができない.
画像として保存したい場合は,
cvConvertScale(image_Re, tmp_image, 255);などとして,0.0-1.0の範囲に正規化されたIPL_DEPTH_64Fのデータを,IPL_DEPTH_8Uのデータに変換した後に,cvSaveImage()で保存する.
// (9)インプレースモード用のテンポラリバッファ
インプレースモード,つまり,入力配列ポインタと出力配列ポインタが同じものをさしている場合,単純に画像のコピーを行うことができない.
そのため,データコピー用にテンポラリバッファを確保する.
// (10)1-4象限を表す配列と,そのコピー先
第1-第4象限までを表す行列と,そのコピー先である同サイズの行列を,部分行列へのポインタとして指定する.
// (11)実際の象限の入れ替え
実際に,画像を整列する.第1象限と第3象限の入れ替え,第2象限と第4象限の入れ替えを行う.
また,インプレースモードの場合は,先に確保したテンポラリバッファを利用する.
実行結果例