機械学習 リファレンス マニュアル
- イントロダクション,共通のクラスと関数(Introduction. Common classes and functions)
- ナイーブベイズ(単純ベイズ)分類器(Normal Bayes Classifier)
- K近傍法(K Nearest Neighbors)
- サポートベクターマシン(SVM)
- 決定木(Decision Trees)
- ブースティング(Boosting)
- ランダムツリー(Random Trees)
- EMアルゴリズム(Expectation-Maximization)
- ニューラルネットワーク(Neural Networks)
EMアルゴリズム(Expectation-Maximization)
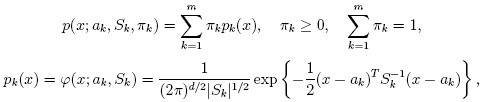
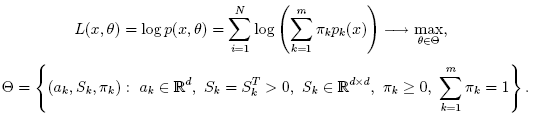
EM(Expectation-Maximization)アルゴリズムは,混合数が指定された混合ガウス分布に基づき,多変量の確率密度関数のパラメータを推定する.特徴ベクトル{x1, x2,...,xN} の集合を考える. d次元ユークリッド空間のN個のベクトルは,混合ガウス分布を用いて以下のように表現される.

EMアルゴリズムが扱うべき問題の一つが,膨大な推定パラメータの数である. パラメータの大多数は共変動行列で表されており,それぞれd×dの要素(ここで,dは特徴空間の次元数である)を持つ. しかし,実際は,共変動行列のほとんどが対角行列であり,さらにμk*I (Iは単位行列,μk は混合分布に依存する「スケール」パラメータ)に非常に近い. 従って,ロバストな計算を行うために,共変動行列により強い制約条件を付けた状態で計算を開始し, そこで推定されたパラメータを入力として,弱い制約条件下での最適化問題を解く(対角共変動行列は,既に十分な精度の近似値になっていることが多い).
参考文献
CvEMParams
EMアルゴリズムのパラメータ
struct CvEMParams
{
CvEMParams() : nclusters(10), cov_mat_type(CvEM::COV_MAT_DIAGONAL),
start_step(CvEM::START_AUTO_STEP), probs(0), weights(0), means(0), covs(0)
{
term_crit=cvTermCriteria( CV_TERMCRIT_ITER+CV_TERMCRIT_EPS, 100, FLT_EPSILON );
}
CvEMParams( int _nclusters, int _cov_mat_type=1/*CvEM::COV_MAT_DIAGONAL*/,
int _start_step=0/*CvEM::START_AUTO_STEP*/,
CvTermCriteria _term_crit=cvTermCriteria(CV_TERMCRIT_ITER+CV_TERMCRIT_EPS,
100, FLT_EPSILON),
CvMat* _probs=0, CvMat* _weights=0, CvMat* _means=0, CvMat** _covs=0 ) :
nclusters(_nclusters), cov_mat_type(_cov_mat_type), start_step(_start_step),
probs(_probs), weights(_weights), means(_means), covs(_covs), term_crit(_term_crit)
{}
int nclusters;
int cov_mat_type;
int start_step;
const CvMat* probs;
const CvMat* weights;
const CvMat* means;
const CvMat** covs;
CvTermCriteria term_crit;
};
- nclusters
- 混合数. EMアルゴリズムの実装のいくつかは,指定された値の範囲から,最適な混合数を決定することができる. しかし,MLの場合は,まだそのような事はできない.
- cov_mat_type
- 混合分布共変動行列のタイプ.次のうちの一つ.
CvEM::COV_MAT_GENERIC - それぞれの混合分布の共変動行列は任意の正定値対称行列であり, それぞれの行列における自由なパラメータ数は約d2/2である. かなり正確なパラメータの推定初期値があるか,学習サンプル数が膨大でない限り,このオプションを使用することは推奨されない.
CvEM::COV_MAT_DIAGONAL - それぞれの行列の共変動行列は任意の正の対角要素を持つ対角行列であり,対角以外の要素は0となる. そのため,自由なパラメータの数は,それぞれの行列でdである.これは良い推定結果をもたらすオプションとして一般的に最も使用される.
CvEM::COV_MAT_SPHERICAL - それぞれの行列の共変動行列は,スケーリングされた単位行列μk*Iである. そのため推定されるパラメータはμkのみである. このオプションは制約条件が関連する特別なケースや,最適化の第1ステップとして(例えば,データがPCA によって事前処理されている場合など)用いられることがある. このような予備推定の結果は,さらにcov_mat_type=CvEM::COV_MAT_DIAGONALを指定した最適化処理に渡される. - start_step
- アルゴリズムをスタートする最初のステップ.次のうちの一つ.
CvEM::START_E_STEP - アルゴリズムはE-stepでスタートする. 少なくとも平均ベクトルの初期値 CvEMParams::means が渡されなければならない. オプションとして,ユーザは重み(CvEMParams::weights)と/または共変動行列(CvEMParams::covs)を与えることもできる.
CvEM::START_M_STEP - アルゴリズムはM-stepでスタートする.初期確率 pi,k が与えられなければならない.
CvEM::START_AUTO_STEP - ユーザから必要な値が指定されない場合,k-meansアルゴリズムが混合分布パラメータの初期値推定に用いられる. - term_crit
- 処理の終了条件.EMアルゴリズムは,特定の繰り返し回数(term_crit.num_iter)に達するか, 繰り返し間における推定パラメータの変化が非常に小さくなった(term_crit.epsilonより小さい)場合に終了する.
- probs
- 確率pi,kの初期値. start_step=CvEM::START_M_STEPのときのみ使用する(その場合はNULLであってはならない).
- weights
- 混合分布の重みπkの初期値. start_step=CvEM::START_E_STEPのときのみ(NULLでない場合は)使用する.
- covs
- 混合分布の共変動行列Skの初期値. start_step=CvEM::START_E_STEPのときのみ(NULLでない場合は)使用する.
- means
- 混合分布の平均 akの初期値. start_step=CvEM::START_E_STEPのときのみ使用する(その場合はNULLであってはならない).
この構造体は二つのコンストラクタを持つ. デフォルトコンストラクタは,大まかな経験則に相当し(パラメータとしてデフォルト値を用いる), もう一つのコンストラクタは,一つの混合数(問題に依存する不可欠なパラメータ)から,混合パラメータの初期値まで,パラメータ数とその値を変更することが可能である.
CvEM
EMモデルクラス
class CV_EXPORTS CvEM : public CvStatModel
{
public:
// 共変動行列のタイプ
enum { COV_MAT_SPHERICAL=0, COV_MAT_DIAGONAL=1, COV_MAT_GENERIC=2 };
// 初期ステップ
enum { START_E_STEP=1, START_M_STEP=2, START_AUTO_STEP=0 };
CvEM();
CvEM( const CvMat* samples, const CvMat* sample_idx=0,
CvEMParams params=CvEMParams(), CvMat* labels=0 );
virtual ~CvEM();
virtual bool train( const CvMat* samples, const CvMat* sample_idx=0,
CvEMParams params=CvEMParams(), CvMat* labels=0 );
virtual float predict( const CvMat* sample, CvMat* probs ) const;
virtual void clear();
int get_nclusters() const { return params.nclusters; }
const CvMat* get_means() const { return means; }
const CvMat** get_covs() const { return covs; }
const CvMat* get_weights() const { return weights; }
const CvMat* get_probs() const { return probs; }
protected:
virtual void set_params( const CvEMParams& params,
const CvVectors& train_data );
virtual void init_em( const CvVectors& train_data );
virtual double run_em( const CvVectors& train_data );
virtual void init_auto( const CvVectors& samples );
virtual void kmeans( const CvVectors& train_data, int nclusters,
CvMat* labels, CvTermCriteria criteria,
const CvMat* means );
CvEMParams params;
double log_likelihood;
CvMat* means;
CvMat** covs;
CvMat* weights;
CvMat* probs;
CvMat* log_weight_div_det;
CvMat* inv_eigen_values;
CvMat** cov_rotate_mats;
};
CvEM::train
サンプル集合からガウス混合パラメータを推定する
void CvEM::train(const CvMat* samples, const CvMat* sample_idx=0,
CvEMParams params=CvEMParams(), CvMat* labels=0 );
多くの機械学習のモデルとは異なり,EMアルゴリズムは教師なし学習アルゴリズムで,入力に対してクラスラベルや関数値を返さない. その代わりに,入力サンプル集合から,ガウス混合パラメータのMLE(最尤推定値)を計算し, 構造体の中にすべてのパラメータを保存する(確率pi,k,平均ak,共変動Sk [k],重みπk). そしてオプションとして,それぞれのサンプルに出力として次のような「クラスラベル」を計算する (labelsi=arg maxk(pi,k), i=1..N). これはつまり,それぞれのサンプルについて可能性の高い混合分布のインデックスである.
学習後のモデルは,他のクラスタリング手法と同様に, 予測に使用することができる.この学習済みモデルは normal bayes classifier に類似している.
(例)複数のガウス分布からランダムにサンプリングされたデータをEMを用いたクラスタリング
#include "ml.h"
#include "highgui.h"
int main( int argc, char** argv )
{
const int N = 4;
const int N1 = (int)sqrt((double)N);
const CvScalar colors[] = {{{0,0,255}},{{0,255,0}},{{0,255,255}},{{255,255,0}}};
int i, j;
int nsamples = 100;
CvRNG rng_state = cvRNG(-1);
CvMat* samples = cvCreateMat( nsamples, 2, CV_32FC1 );
CvMat* labels = cvCreateMat( nsamples, 1, CV_32SC1 );
IplImage* img = cvCreateImage( cvSize( 500, 500 ), 8, 3 );
float _sample[2];
CvMat sample = cvMat( 1, 2, CV_32FC1, _sample );
CvEM em_model;
CvEMParams params;
CvMat samples_part;
cvReshape( samples, samples, 2, 0 );
for( i = 0; i < N; i++ )
{
CvScalar mean, sigma;
// 学習サンプルから
cvGetRows( samples, &samples_part, i*nsamples/N, (i+1)*nsamples/N );
mean = cvScalar(((i%N1)+1.)*img->width/(N1+1), ((i/N1)+1.)*img->height/(N1+1));
sigma = cvScalar(30,30);
cvRandArr( &rng_state, &samples_part, CV_RAND_NORMAL, mean, sigma );
}
cvReshape( samples, samples, 1, 0 );
// モデルパラメータの初期化
params.covs = NULL;
params.means = NULL;
params.weights = NULL;
params.probs = NULL;
params.nclusters = N;
params.cov_mat_type = CvEM::COV_MAT_SPHERICAL;
params.start_step = CvEM::START_AUTO_STEP;
params.term_crit.max_iter = 10;
params.term_crit.epsilon = 0.1;
params.term_crit.type = CV_TERMCRIT_ITER|CV_TERMCRIT_EPS;
// データのクラスタリング
em_model.train( samples, 0, params, labels );
#if 0
// 初期ステージの出力を第2ステージの入力として使用する場合に,
// 拘束の小さいパラメータ(COV_MAT_SPHERICALの代わりにCOV_MAT_DIAGONAL)を使って
// モデルの最適化の繰返しを行う例
CvEM em_model2;
params.cov_mat_type = CvEM::COV_MAT_DIAGONAL;
params.start_step = CvEM::START_E_STEP;
params.means = em_model.get_means();
params.covs = (const CvMat**)em_model.get_covs();
params.weights = em_model.get_weights();
em_model2.train( samples, 0, params, labels );
// em_model2を使用するために, em_model.predict()を以下のem_model2.predict()に取り替える
#endif
// 画像の各ピクセルを分類する
cvZero( img );
for( i = 0; i < img->height; i++ )
{
for( j = 0; j < img->width; j++ )
{
CvPoint pt = cvPoint(j, i);
sample.data.fl[0] = (float)j;
sample.data.fl[1] = (float)i;
int response = cvRound(em_model.predict( &sample, NULL ));
CvScalar c = colors[response];
cvCircle( img, pt, 1, cvScalar(c.val[0]*0.75,c.val[1]*0.75,c.val[2]*0.75), CV_FILLED );
}
}
// クラスタリング後のサンプルを描画
for( i = 0; i < nsamples; i++ )
{
CvPoint pt;
pt.x = cvRound(samples->data.fl[i*2]);
pt.y = cvRound(samples->data.fl[i*2+1]);
cvCircle( img, pt, 1, colors[labels->data.i[i]], CV_FILLED );
}
cvNamedWindow( "EM-clustering result", 1 );
cvShowImage( "EM-clustering result", img );
cvWaitKey(0);
cvReleaseMat( &samples );
cvReleaseMat( &labels );
return 0;
}